
Pembahasan Selanjutnya
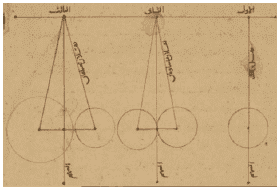
19. Abu Rayhan Muhammad ibn Ahmad al- Biruni (973-1050 M) dalam karyanya yaitu Kitab Ifrad al-Maqal fi Amr al-Zilal melakukan penghitungan ketinggian ℎ (vertikal) gunung dengan melakukan dua pengukuran sudut dari posisinya berpijak ke arah puncak gunung (Ө1 dan Ө2) dengan jarak antara dua pengukuran tersebut sebesar d. Kemudian al-Biruni menentukan jari-jari bola bumi yang berguna untuk penentuan gravitasi bumi dengan mengukur sudut horizon α dari puncak sebuah gunung yang telah dilakukan penghitungan ketinggiannya ℎ yang tercantum dalam kitabnya yang lain yaitu Kitab Tahdid Nihayat al-Amakin Litashih Masafat al- Masakin. Jari-jari bumi tersebut adalah…

pembahasan:
h = d.tan θ1
+ x.tan θ1
+ x.tan θ1
h . tanθ1 = h. tanθ2 – d.tan θ1 .
tanθ2
tanθ2
h. tanθ2 – h . tanθ1 =
d.tan θ1 . tanθ2
d.tan θ1 . tanθ2
h. (tanθ2 – tanθ1 )= d.tan
θ1 . tanθ2
θ1 . tanθ2
Substitusikan kededalam pesamaan beikut
|
__________________________
|
|
|
(tanθ2 – tanθ1
) .(1-cosα) |
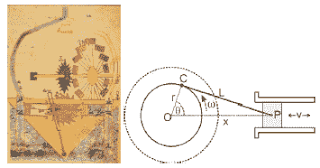
20. Dalam Kitab fi ma’rifat al-hiyal alhandasiya, Abu al-‘Izz ibn Isma’il ibn ar- Razaz al-Jazari (1136–1206 M) membuat sistem engkol-piston sebagai penggerak pompa air. Dalam teknologi modern sistem engkol-piston diadopsi dalam berbagai mesin berbahan bakar. Berikut adalah gambar karya al-Jazari dan model mekanisme sistem engkol-piston. Lingkaran engkol dapat bergerak rotasi dengan kecepatan sudut ω terhubung dengan piston yang bergerak translasi dengan kecepatan 𝑣. Berdasarkan desain tersebut, diketahui jari-jari engkol sebesar r, batang penghubung engkol dan piston panjangnya adalah L. Kecepatan translasi piston sepanjang garis x adalah…
21. Untuk memberikan kenyamanan, pada kendaraan bermotor biasanya dilengkapi dengan sistem suspensi yang dapat dimodelkan sebagai pegas dan piston dashpot (konsep piston pertama kali diperkenalkan oleh al-Jazari (1136-1206M)) sebagai berikut.
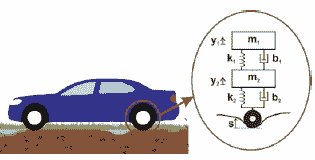
Jika M1 adalah massa seperempat bagian badan mobil, M2 adalah massa sistem suspensi, k1 adalah konstanta pegas sistem suspensi, k1 adalah konstanta pegas sistem ban dan roda, b1adalah konstanta redam sistem suspensi, b1 adalah konstanta redam sistem ban dan roda, s adalah posisi input jalan berbatu bergelombang tak beraturan, y adalah posisi massa yang berosilasi, vy adalah kecepatan massa karena perubahan y, serta vs adalah kecepatan karena perubahan posisi input jalan berbatu bergelombang (Catatan: Kondisi awal keseimbangan, gaya gravitasi diimbangi dengan gaya pegas untuk melawan gravitasi sehingga gaya gravitasi dan gaya pegas yang melawannya dalam hal ini diabaikan dan gaya yang bekerja pada mobil adalah hanya gaya pegas yang timbul karena jalan berbatu -ky dan gaya redam -by). Percepatan massa M1 dan massa M2 saat mobil bergerak adalah…
22. Desain rangkaian elektronik berikut menunjukkan sebuah rangkaian lampu otomatis yang digunakan Masjid Darussalam Bandung. Lampu otomatis ini akan menyala saat kondisi lingkungan gelap dan padam saat kondisi lingkungan terang.
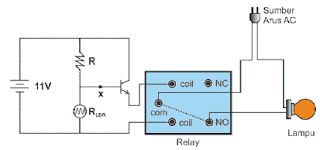
Saat kondisi lingkungan gelap, resistansi LDR (light dependent resistor) adalah 2 MΩ, dan saat kondisi lingkungan terang, resistansi LDR menjadi 2 kΩ. Rangkaian lampu otomatis ini diberi tegangan sumber DC sebesar 11 Volt serta tegangan yang terbaca pada titik x adalah 1 Volt saat kondisi lingkungan terang. Tegangan pada titik x (terhadap ground) saat kondisi lingkungan gelap untuk menghidupkan relay lampu AC adalah…
(A) 7.782 𝑉𝑜𝑙𝑡
(B) 8.782 𝑉𝑜𝑙𝑡
(C) 9.891 𝑉𝑜𝑙𝑡
(D) 10.891 𝑉𝑜𝑙𝑡
23. Seorang anggota TNI yang berada di lokasi B sedang menguji sebuah rudal RI-01 dengan target sebuah pulau tak berpenghuni di tengah lautan yang kita sebut sebagai A. Rudal RI-01 tersebut dilengkapi program komputer berdasarkan algoritma Abu Rayhan al-Biruni (973-1050 M) trigonometri bola bumi untuk menentukan sudut arah target terhadap kutub utara bumi. Jika diketahui koordinat titik A adalah bujur Ba dan lintang La , koordinat titik B adalah bujur Bb dan lintang Lb , koordinat titik C (kutub utara) memiliki lintang = 90° sebagaimana ilustrasi berikut.
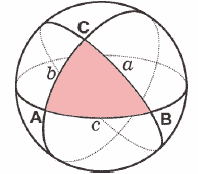
Dimana busur 𝑎 adalah panjang busur penghubung titik B dan C, busur b adalah panjang busur penghubung titik A dan C, busur c adalah panjang busur penghubung titik A dan B, sudut 𝐶 = 𝐵𝑎 − 𝐵𝑏, sudut B adalah arah menuju titik A, jadi untuk menentukan arah rudal dapat diperoleh jika, sudut B diketahui.
Jika diketahui C = Ba – Bb , a = 90o – Lb, b = 90o – La , cos (90o – x) = sin x , sin (90o – x) = cos x , cotan (90o – x) = tan x = cos a . cos c + sin a . sin c . cos B, dan sin B . sin c = sin b . sin C, maka sudut rudal B menuju target terhadap utara bumi adalah….
24. Abu al-‘Izz ibn Isma’il ibn ar-Razaz al-Jazari (1136–1206 M) dalam Kitab fi ma’rifat al-hiyal al-handasiya membuat sistem katrol yang dapat menghasilkan gerak rotasi.

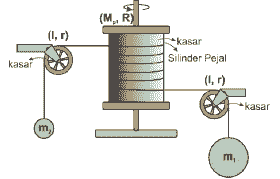
Diketahui pada sistem, m1 >>m2, kedua katrol identik dengan momen inersia l dan berjari-jari r, sedangkan batang putar berbentuk silinder pejal bermassa Mp dan berjari-jari R. Asumsikan katrol dan batang putar kasar sehingga dapat berotasi. Jika awalnya batang putar tersebut diam, dengan Өo = 0, ωo = 0, serta percepatan gravitasi g, kemudian sistem bergerak sehingga batang putar mulai berotasi dengan percepatan sudut tetap, maka kecepatan sudut batang putar ωt saat batang putar menempuh sudut Өt adalah…
25. Dalam Kitab Mizan al-Hikmah karya Abū al-Fath Abd al-Rahman Mansūr al-Khāzini (Abad 11-12 M) menjelaskan tentang pusat massa atau pusat gravitasi sistem benda.
Jika massa benda M1 = 2M, M2 = M, serta jari-jari benda R1 = 2 dan R2 = R, maka pusat massa sistem dua benda tersebut dari acuan titik O seperti yang terlihat pada gambar adalah…
(A) 2.3R (B) 2.7R (C) 3.0R (D) 3.3R
kunci jawaban no 11 – 25:
11. C 12. D 13. A 14. C 15. B
16. C 17. A 18.D 19.C 20.A
21. B 22. D 23.C 24. C 25. C
>>>> Soal KSM 2019 fisika MA bentuk pdf bisa di download disini
Semogaa bermanfaat
